|
I am an incoming PhD student in Computer Science at the Artificial Intelligence & Visual Computing Lab at UCLA, co-advised by Prof. Chenfanfu Jiang and Prof. Demetri Terzopoulos. Previously, I obtained my M.S. in Computer Science from UC San Diego and my B.Eng. in Software Engineering from the University of Electronic Science and Technology of China. CV | Email:siiyuma@outlook.com | Github | LinkedIn | WeChat |

|
{kind=link}
|
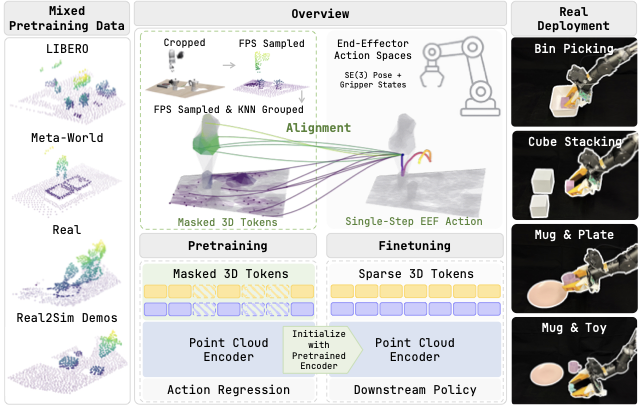
My research focuses on robot learning for contact-rich manipulation, emphasizing contact-aware policy learning and physics-based simulation frameworks that enable efficient and reliable sim-to-real transfer. |
|
|
|
|
|
ICRA, 2026
|
|
IROS, 2025
|
|
ICRA, 2025
|
|
I am an animal lover, and in my free time, I enjoy spending time with pets.🐶🐱🐹 |
|
Design and source code from Jon Barron.
|