|
I'm a Ph.D. student in Computer Science at the University of California, San Diego, co-advised by Prof. Hao Su and Prof. Chenfanfu Jiang. Previously, I obtained my M.S. in Computer Science from UC San Diego and my B.Eng. in Software Engineering from the University of Electronic Science and Technology of China. 🌟 I value communication with people from diverse backgrounds. If you're interested in collaborating or learning more about my work or experiences, feel free to reach out via email or WeChat. CV / Email:siiyuma@outlook.com / Github / LinkedIn / WeChat |

|
{kind=link}
|
My research focuses on robot learning for contact-rich manipulation, emphasizing contact-aware policy learning and physics-based simulation frameworks that enable efficient and reliable sim-to-real transfer. |
|
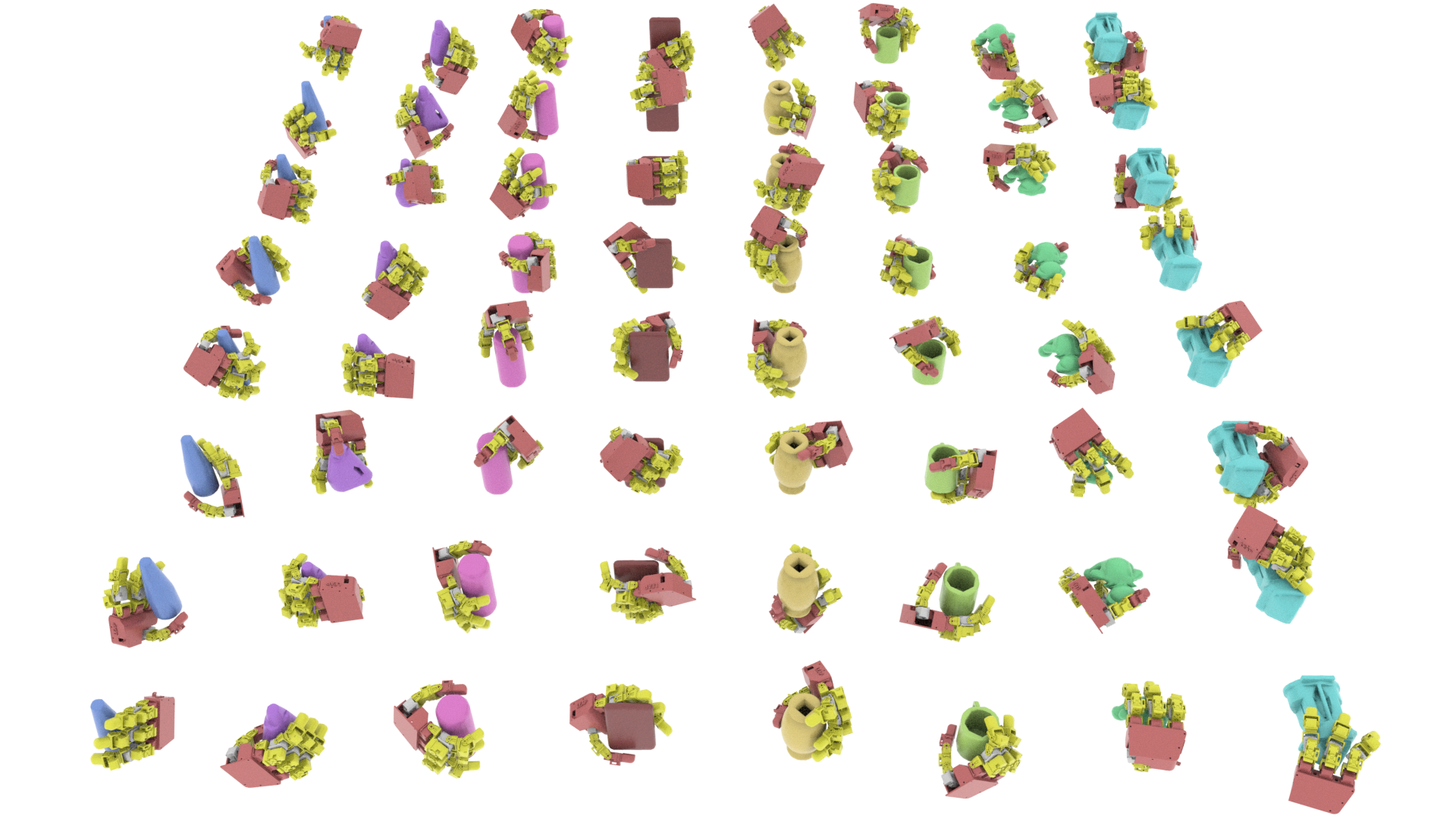
Chang Yu*, Siyu Ma*, Wenxin Du, Zeshun Zong, Han Xue, Wendi Chen, Cewu Lu, Yin Yang, Xuchen Han, Joseph Masterjohn, Alejandro Castro, Chenfanfu Jiang. ICRA, 2026 preprint / project page / video |
|
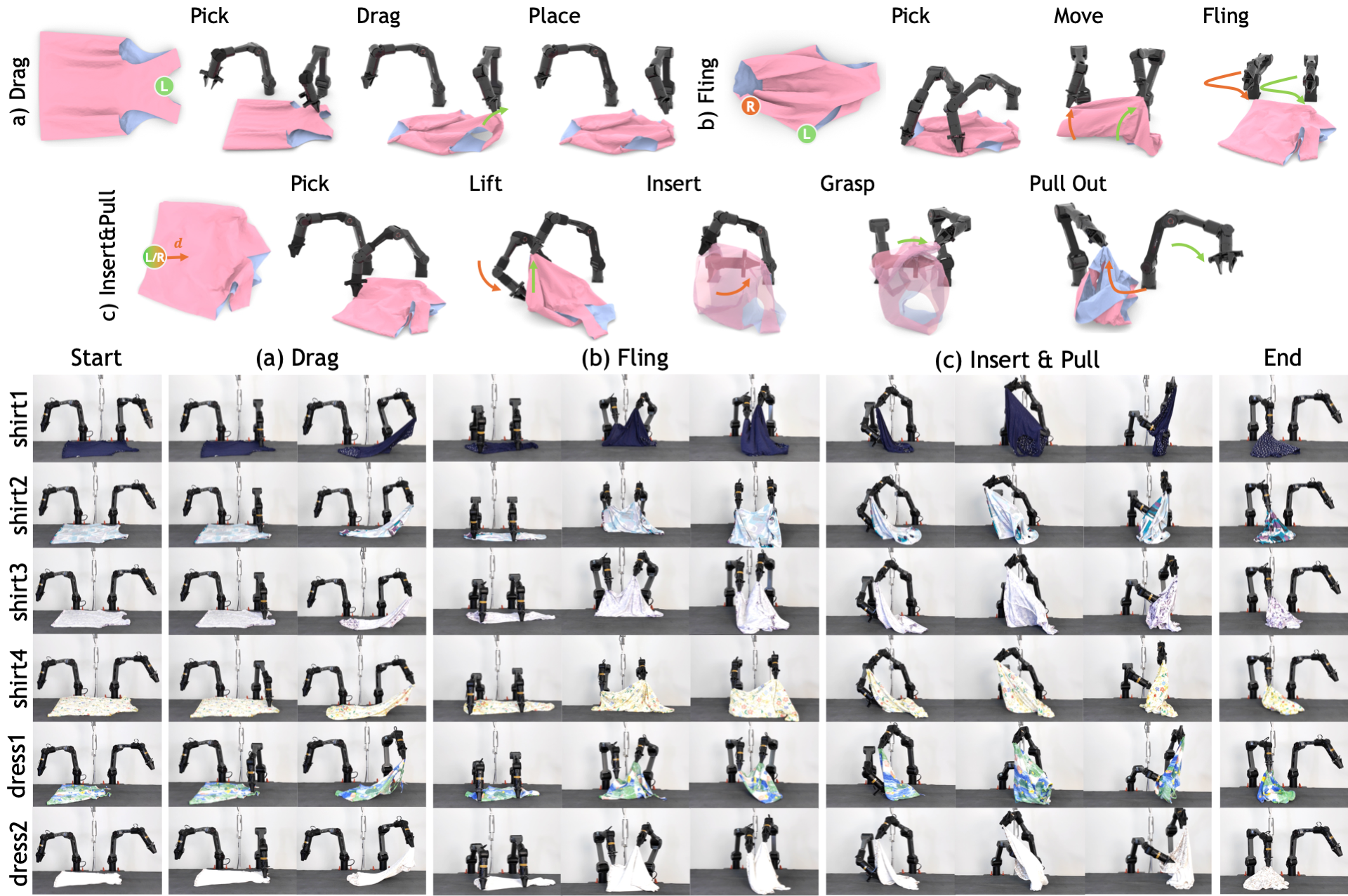
Siyu Ma*, Wenxin Du*, Chang Yu*, Ying Jiang*, Zeshun Zong, Tianyi Xie, Yunuo Chen, Yin Yang, Xuchen Han, Chenfanfu Jiang. IROS, 2025 preprint / project page / video |
|
Wenxin Du*, Chang Yu*, Siyu Ma, Ying Jiang, Zeshun Zong, Yin Yang, Joe Masterjohn, Alejandro Castro, Xuchen Han, Chenfanfu Jiang. ICRA, 2025 preprint / project page |
|
I am an animal lover, and in my free time, I enjoy spending time with pets.🐶🐱🐹 |
|
Design and source code from Jon Barron.
|